CNC gesteuerte Styroporschneidemaschine im Eigenbau

Geschichte
Im Laufe der letzten Jahre habe ich immer wieder festgestellt, daß meine Ansprüche an Flugmodelle linear anwachsen, während die Kosten ein eher exponentielles Wachstum aufweisen. Aus diesem Grund hatte ich mich entschlossen ein Modell nach FMT-Bauplan, die Supra Fly 2500 zubauen. Mit dem Schneiden von Styropor habe ich mich damals in ein völlig unbekanntes Gebiet gewagt. Die schnellen, einfachen und vor allem guten Ergebnisse haben mich schnell dazu bewogen, weitere Modelle mit Styroporunterstützung zu bauen. Etwas lästig ist es allerdings die Schneidrippen anzufertigen. Auch eine schnelle Erstellung eines Styroteils scheitert meißtens daran, daß gerade kein passender Schneidepartner vorhanden ist. Nichtzuletzt die nicht immer überragende Qualität der handgeschnittenen Produkte haben mich dazu bewegt eine Styroporschneidemaschine anzuschaffen.
Auf dem Markt gibt es einige Hersteller solcher Maschinen, allerdings sind diese meines Erachtens für den reinen Hobbybereich nicht finanziell tragbar. Logische Konsequenz daraus: Dann muß eben selbst eine gebaut werden. Die Elektronik zur Ansteuerung der 4 Schrittmotoren sollte als gelernter Elektroingenieur kein Problem sein. Schwieriger war da schon die Mechanik. Sie sollte eine ausreichende Genauigkeit, große Verfahrwege (für Flächen- wie auch Rumpfteile) aber trotzdem nicht zu kompliziert und eben auch preiswert sein. Schnell war mit Richard Stengel ein Vereinskamerad gefunden der als Mechaniker zur selben Zeit ebenfalls an einer Schneidemaschine rumbaute, allerdings eine passende Elektronik suchte. Somit wurde das gemeinsame Projekt in Angriff genommen.
Die Mechanik
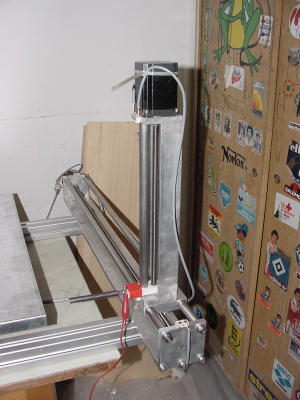
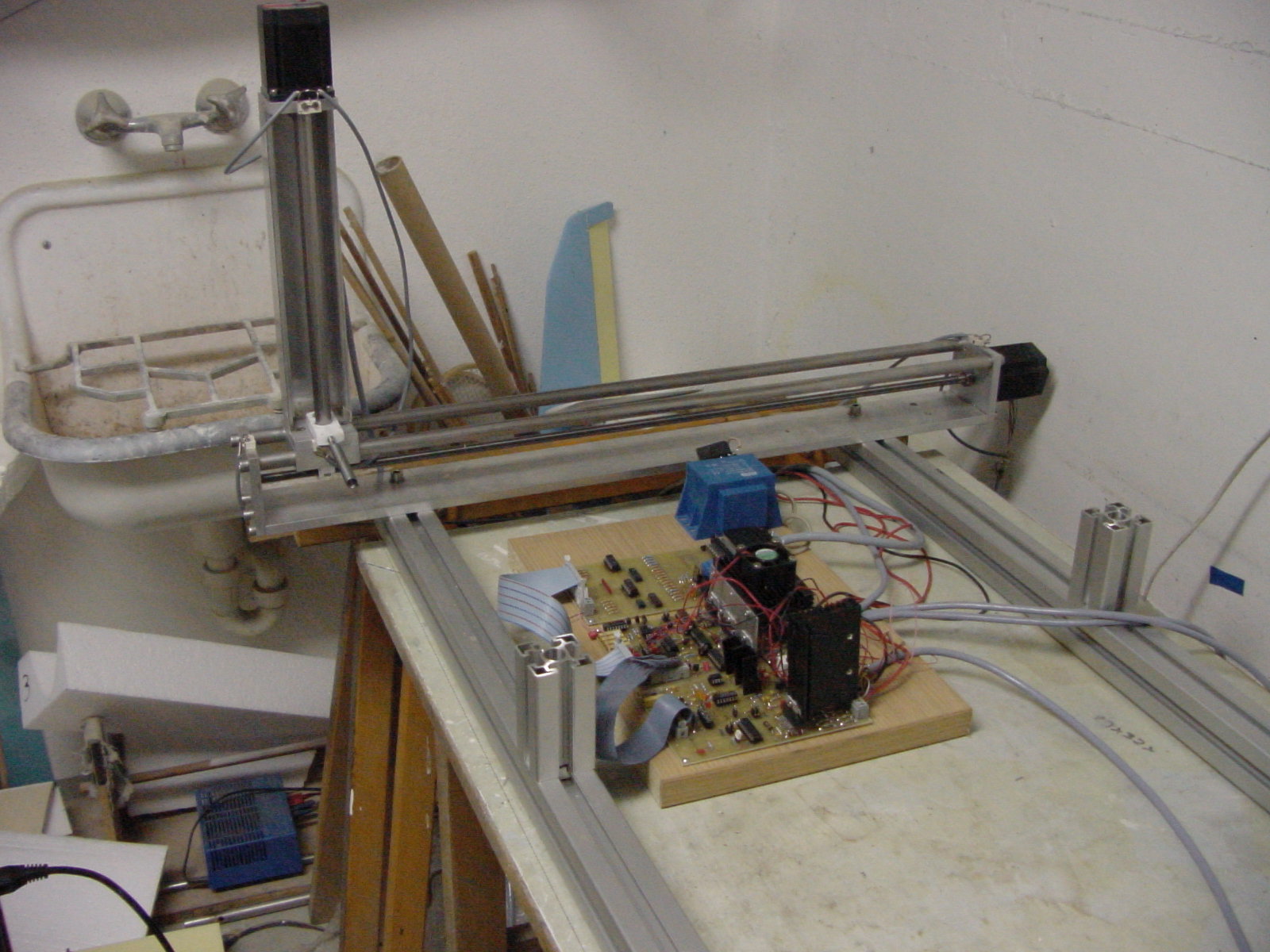
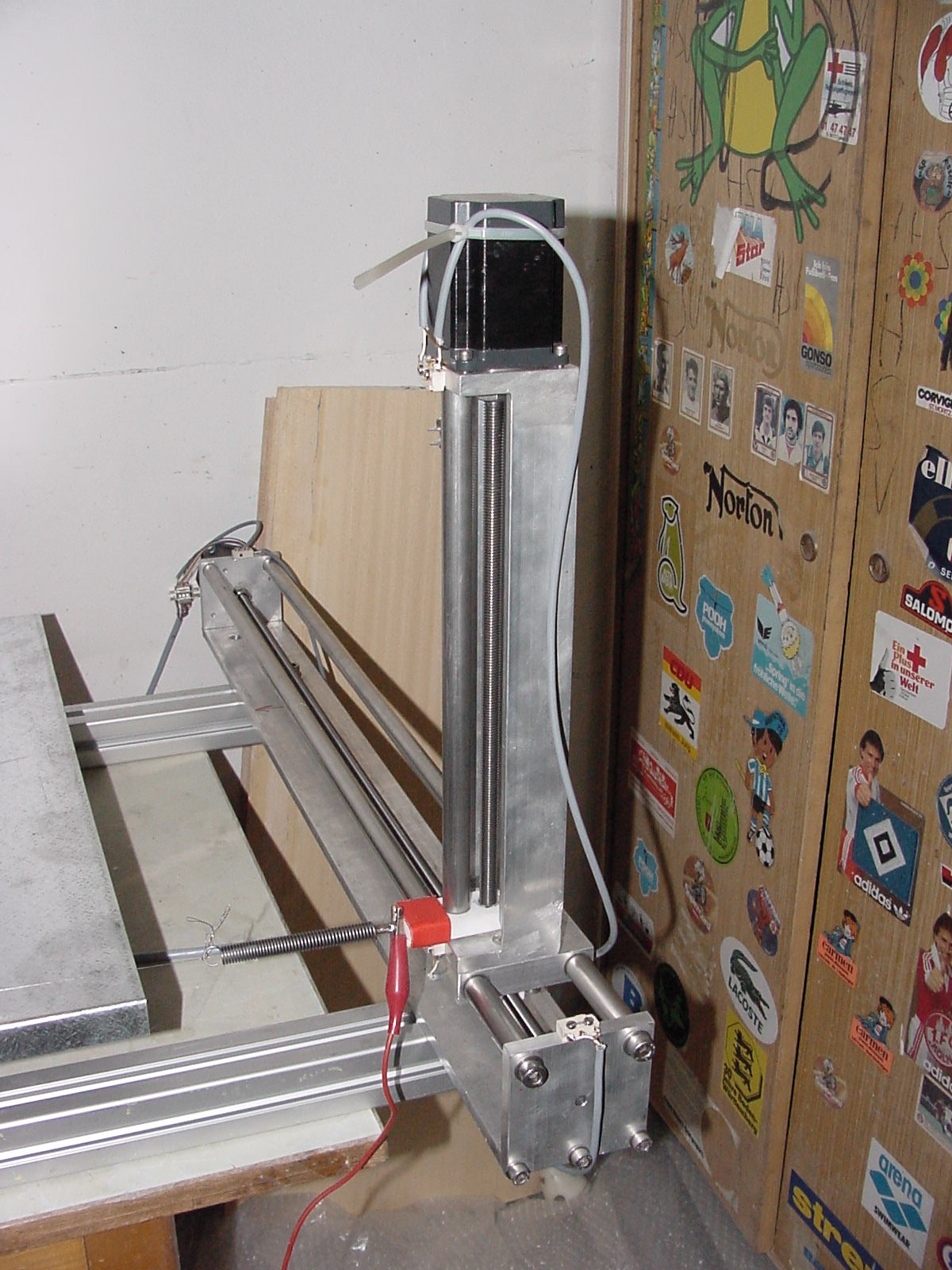
Da ich zugegebenermaßen von Mechanik wirklich nicht die große Ahnung habe, allerdings der Autor dieser Homepage bin, beschränken sich die Beschreibungen zur Mechanik im wesentlichen auf Photos (die kommen auch bald). Vielleicht kann ich allerdings auch den Richard als Erbauer noch dazu bewegen ein paar erklärende Worte zu schreiben. Die Mechanik besteht im wesentlichen aus zwei Portalen, welche jeweils aus einer x- und einer z-Achse bestehen. Der Schlitten für die x- Achse läuft von zwei Rundstählen geführt auf einem M10-Gewinde als Vortrieb. Die z-Achse ist auf dem Schlitten der x-Achse befestigt und wird von einem Rundstahtl und einem M10-Gewinde, welches gleichzeitig als Vortrieb fungiert, geführt. Alle Achsen sind beidseitig mit Endschaltern ausgeführt. Die Drahtspannung soll als erstes mal mit einer kräftigen Zugfeder erzeugt werden, welche gleichzeitig auch die Längenänderung des Drahtes ausgleichen soll.
Die Elektronik
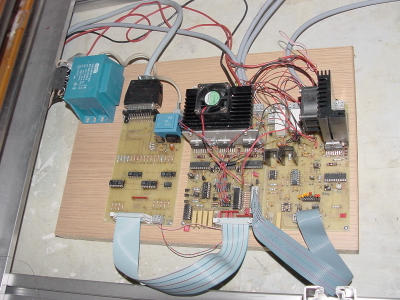
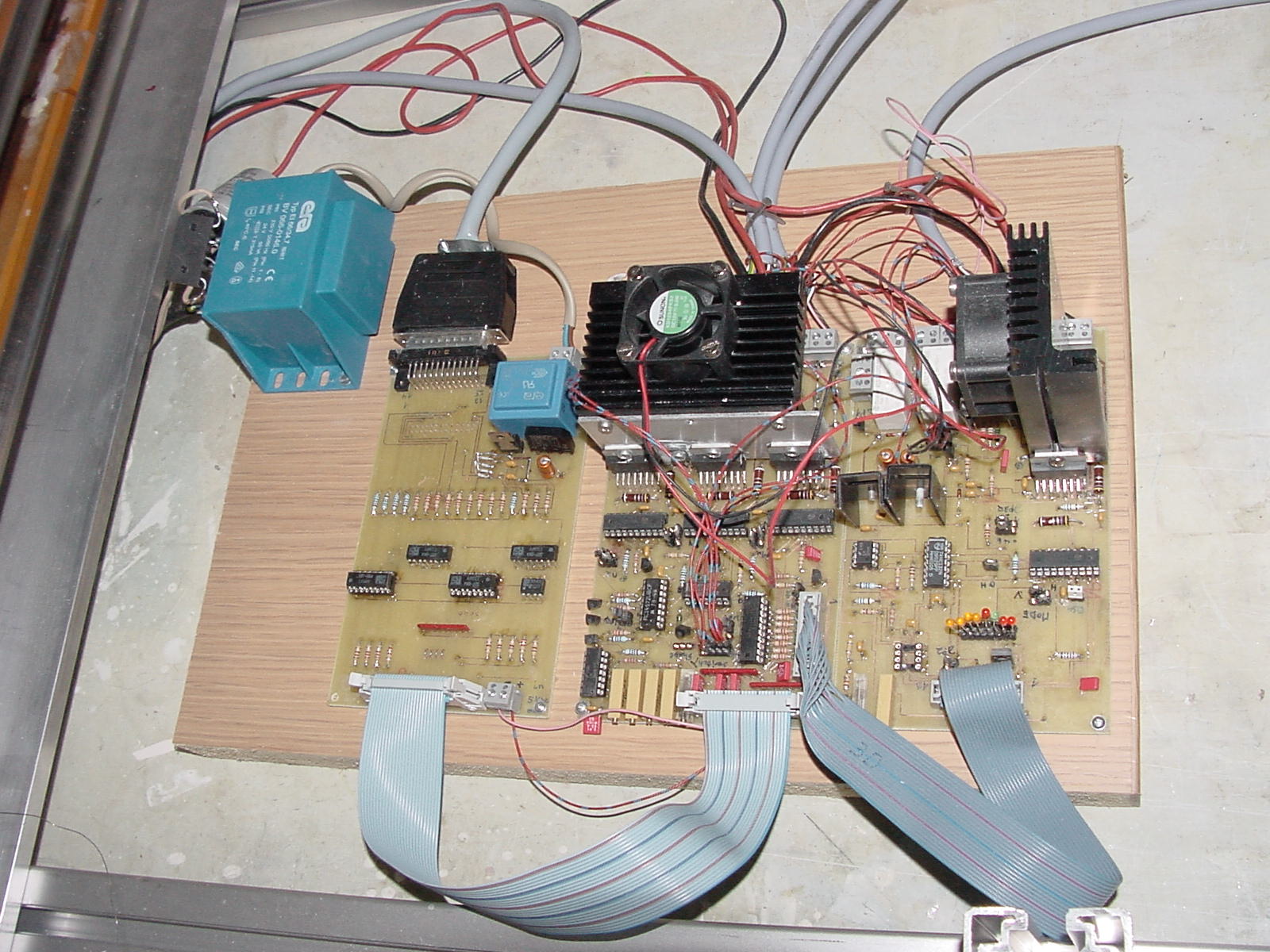
Bei der Elektronik handelt es sich nicht um eine reine Eigenentwicklung. Diese Mühe haben sich schon viele Leute gemacht, warum also nicht darauf aufbauen? Die wesentlichen Denkanstöße wie auch Teile der Schaltung habe ich dabei auf Thorsten Ostermanns Seite NC-Step gefunden. Es handelt sich dabei um ein modulares System für die Ansteuerung von einer, drei oder vier Achsen, wobei hier als Schrittmotor Elektronik der Treiber L297 mit der Endstufe L298N verwendet wird. Dabei handelt es sich um Industriequalität, mit der auch stärkere und vor allem bipolare Motoren (im Hinblick auf eine spätere Konstruktion einer Fräsmaschine) im Vollschritt- sowie Halbschrittmodus betrieben werden können. Die Schaltung bietet die Möglichkeit den Strom für die Motoren je nach Bedarf vom Rechner aus zu steuern. Dies ist besonders im Hinblick auf das Netzgerät interessant, da auf diese Weise der mittlere Leistungbedarf der Schaltung reduziert werden kann. Zusätzlich habe ich die Schaltung noch auf die Möglichkeit eines Handbetriebs im Autoschrittmodus erweitert. Komplettiert wird die Elektronik durch eine Optokopplerkarte zur galvanischen Trennung und zum Schutz der parallelen PC-Schnittstelle. Das ganze wird von einem Netzteil mit den Spannungen 5V/1A, 12V/1A, 32V/8A versorgt. Ein Teil der 32V-Versorgung wird für die Heizdrahtversorgung im Stromregelbetrieb verwendet. Alle Leistungsbauteile befinden sich auf Kühlkörpern mit Temperaturüberwachung, welche bei Bedarf Lüfter zuschaltet oder im Falle einer Überhitzung sogar den Leistungsteil abschaltet. Herausgekommen sind nun selbstgeätzte 4 Platinen im Europakartenformat, welche in einem extra dafür lasergeschnittenen Gehäuse platz finden werden.
Die Software
Für die Software bin ich zur Zeit noch auf der Suche. Das Programm Phoenix von Thomas Gmehlin sagt mir hier ganz gut zu. Der einzige Knackpunkt ist allerdings, daß noch ein echtes DOS benötigt wird, d.h. Win-NT oder XP Benutzer schauen hier in die Röhre. Es gibt zwar auch einige Programme die unter Windows lauffähig sind, allerdings entweder zu teuer oder ohne die wichtigen Importfunktionen für HPGL-Dateien aus anderen Programmen. Am liebsten wäre mir sogar ein Programm unter Linux, da bin ich allerdings auch noch nicht fündig geworden. Naja. sollte sich nichts anderes finden, dann muß ich mir eben noch ein DOS installieren.
Technische Daten
Verfahrwege x: ca. 720mm
Verfahrwege z: ca. 280mm
Nutzbare Drahtlänge: ca.1100mm (jederzeit vergrößerbar)
Gewicht:
Motoren: Vexta PK268-E2.0B mit 1,35Nm, 200 Schritte, 2A maximaler Strangstrom, uni- und bipolar ansteuerbar
Elektronik: Eigenbauelektronik für 4 bipolare Schrittmotoren mit maximal 3A Strangstrom
Besonderheiten: