Geschwindigkeitsmessung mittels Dopplereffekt
Geschichte
Schon immer hat mich interessiert, wie schnell Modellflugzeuge eigentlich sind. Die einfache Messmethode mittels Stoppuhr und abgemessener Strecke war mir zu aufwendig und zu ungenau. Eine Lichtschrankenmessung ist eher schwierig zu realisieren, da man mit dem Modell ja auch wirklich durch die Lichtschranke fliegen muß. Eine Messung mittels GPS-Empfänger schied für mich auch aus, weil ich zu faul bin, immer den Empfänger in das zu messende Modell einzubauen.
Eine relativ einfache Möglichkeit die Geschwindigkeit sehr genau zu messen liefert der Doppler-Effekt. Jeder kennt das Geräusch, wenn ein Auto vorbeifährt. Der Ton ist beim ankommenden Fahrzeug etwas erhöht und beim abfahrenden etwas erniedrigt. Die Höhe der Frequenzverschiebung ist dabei direkt korreliert mit der Geschwindigkeit des Fahrzeugs. Dies gilt natürlich nicht nur für Auto's sondern alle bewegte Objekte welche Schall emittieren.
Technik
Aus diesem Grund habe ich mich entschlossen ein c-Programm zu schreiben, welches auf meinem Linux-Laptop läuft und mit Hilfe der eingebauten Soundkarte in Verbindung mit einem Mikrophon eine Berechnung der Geschwindigkeit automatisch nach einem Vorbeiflug durchführt.
 Ein mit dem Laptop und Mikrophon aufgenommenes Schallsignal ist in Bild 1 dargestellt. Der Zeitpunkt der größten Amplitude ist in erster Näherung auch der Zeitpunkt des direkten Überfluges über das Aufnahmemikrophon. Von diesem Zeitpunkt ausgehend, kann nun das Schallsignal aufgeteilt werden in ein Anflug- und ein Abflugsignal. Da das zu messende Objekt nicht direkt durch das Mikrophon durchfliegt, sondern in einem gewissen Abstand vorbeifliegt und sich deshalb die Frequenz in der Nähe des Überflugzeitpunktes stark ändert, sollte eine bestimmte Zeitdauer vor und nach dem Überflug nicht zur eigentlichen Messungen verwendet werden. Je größer der Abstand der Flugbahn zum Mikrophon ist umso größer sollte auch diese nicht berücksichtigte Totzeit sein um den Meßfehler gering zu halten.
Ein mit dem Laptop und Mikrophon aufgenommenes Schallsignal ist in Bild 1 dargestellt. Der Zeitpunkt der größten Amplitude ist in erster Näherung auch der Zeitpunkt des direkten Überfluges über das Aufnahmemikrophon. Von diesem Zeitpunkt ausgehend, kann nun das Schallsignal aufgeteilt werden in ein Anflug- und ein Abflugsignal. Da das zu messende Objekt nicht direkt durch das Mikrophon durchfliegt, sondern in einem gewissen Abstand vorbeifliegt und sich deshalb die Frequenz in der Nähe des Überflugzeitpunktes stark ändert, sollte eine bestimmte Zeitdauer vor und nach dem Überflug nicht zur eigentlichen Messungen verwendet werden. Je größer der Abstand der Flugbahn zum Mikrophon ist umso größer sollte auch diese nicht berücksichtigte Totzeit sein um den Meßfehler gering zu halten.
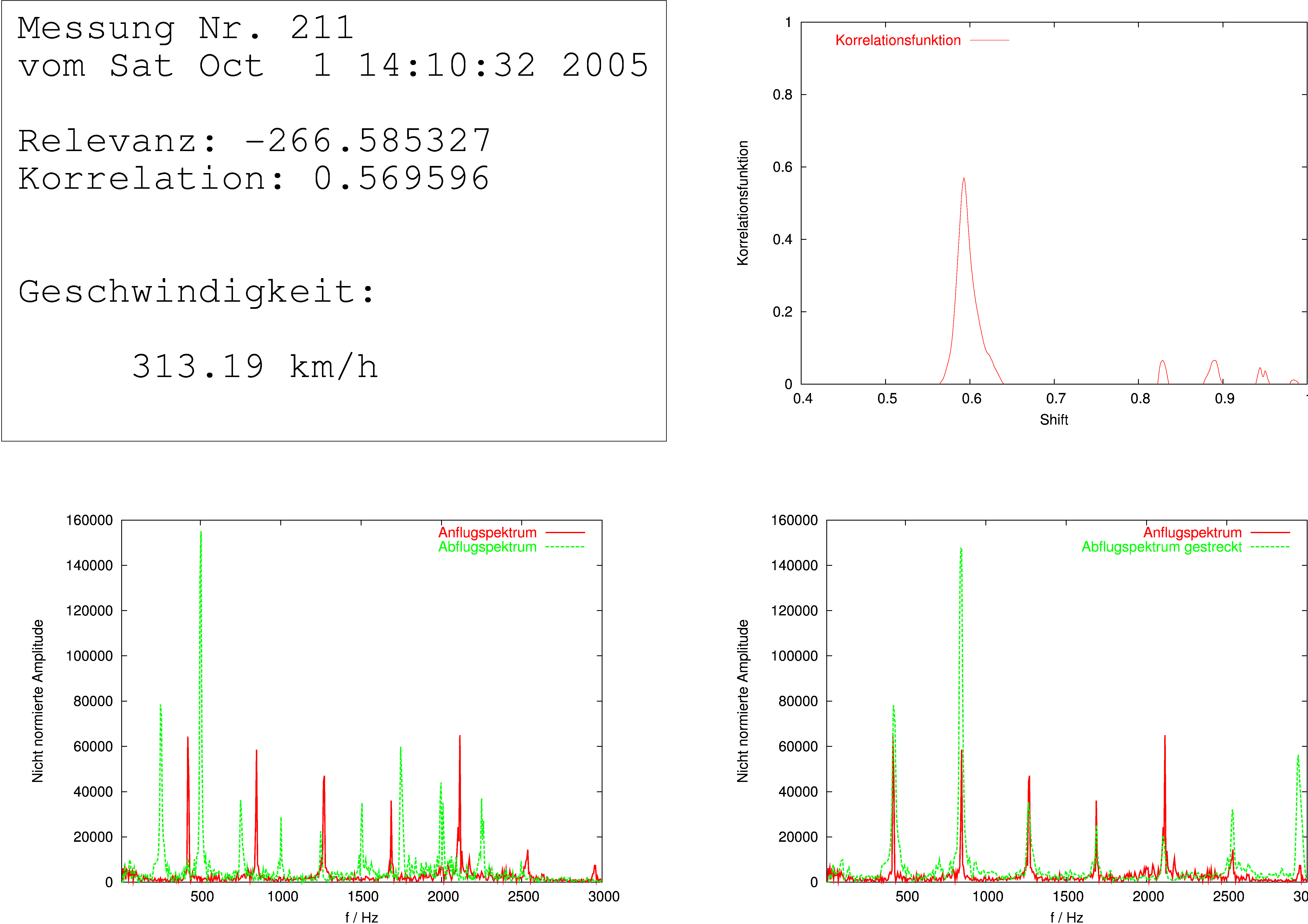
 Werden nun die beiden Signale (An- und Abflug) mittels schneller Fourieranalyse (FFT) in ihre Spektralanteile zerlegt, erhält man das jeweilige Frequenzspektrum (Bild 2), welches im wesentlichen von der Motordrehzahl dominiert wird. Bei einer korrekten Messung weisen beide Spektren eine ähnliche Form auf, wobei das Abflugspektrum gegenüber der Frequenz 0Hz gestaucht ist.
Werden nun die beiden Signale (An- und Abflug) mittels schneller Fourieranalyse (FFT) in ihre Spektralanteile zerlegt, erhält man das jeweilige Frequenzspektrum (Bild 2), welches im wesentlichen von der Motordrehzahl dominiert wird. Bei einer korrekten Messung weisen beide Spektren eine ähnliche Form auf, wobei das Abflugspektrum gegenüber der Frequenz 0Hz gestaucht ist.
Was bleibt ist die Stauchung zu ermitteln, da sie über die Schallgeschwindigkeit in direktem Zusammenhang mit der Fluggeschwindigkeit steht. Eine relativ einfache Möglichkeit bietet hier die Kreuzkorrelationsfunktion zwischen beiden Spektren. Dabei wird das Anflugspektrum schrittweise gestaucht und die Korrelation zum Abflugspektrum gebildet. Wie in Bild 3 zu sehen ist, weist die Korrelationsfunktion ein deutliches Maximum für eine Stauchung von 0.838 auf.
 Je ausgeprägter dieses Maximum ist, desto genauer war die Messung. Diese Kurve gibt also auch Aufschluß über die Qualität einer Messung. Im gezeigten Fall mussten alle x-Werte des Anflugspektrums mit den Faktor 0.838 multipliziert werden um eine maximale Übereinstimmung mit dem Abflugspektrum zu erreichen. Dieser Faktor und die Schallgeschwindigkeit kann direkt in die bekannte Formel für die Dopplerverschiebung eingesetzt werden und man erhält v=1238km/h *(1-0.838)/(1+0.838)=109km/h.
Diese Kurve stammt übrigens von meinem Puma während eines normalen Überflugs mit ungefähr Halbgas. Bei Vollgas waren es knappe 200km/h.
Je ausgeprägter dieses Maximum ist, desto genauer war die Messung. Diese Kurve gibt also auch Aufschluß über die Qualität einer Messung. Im gezeigten Fall mussten alle x-Werte des Anflugspektrums mit den Faktor 0.838 multipliziert werden um eine maximale Übereinstimmung mit dem Abflugspektrum zu erreichen. Dieser Faktor und die Schallgeschwindigkeit kann direkt in die bekannte Formel für die Dopplerverschiebung eingesetzt werden und man erhält v=1238km/h *(1-0.838)/(1+0.838)=109km/h.
Diese Kurve stammt übrigens von meinem Puma während eines normalen Überflugs mit ungefähr Halbgas. Bei Vollgas waren es knappe 200km/h.
Zur Überprüfung der ganzen Messung und Rechnung kann nun das Abflugspektrum um den Faktor 1/0.838 gestreckt werden. Hierbei werden die einzelnen Spektrallinien der beiden Spektren quasi wieder übereinandergeschoben. Dies ist in Bild 4 dargestellt. Da die Charakteristik bei beiden die selbe ist, d.h. der relative Abstand der einzelnen Peaks ist gleich, sollten dann die Maxima wieder übereinanderlegen. Für die jeweilige Messung ist dies allerdings nicht erforderlich, da bereits die Kurvenform der Korrelationsfunktion für eine Verifikation der Messung ausreichend ist. Dies wird bei meinem Programm automatisch erledigt, indem ein Wert für die Relevanz der Messung ausgegeben wird.
Messfehler und Probleme
Wie jede Messung hat natürlich auch diese Variante ihre Nachteile. So ensteht zum Beispiel ein enormer Meßfehler, wenn das Modell vor dem Überflug angestochen und anschließend wieder hochgezogen wird. Dadurch ändert sich die Motordrehzahl und damit auch das emittierte Spektrum. Auf diese Weise kann man mit einem Charter mal locker eine fiktive Geschwindigkeit über 200km/h erreichen!! Für die Messung ist also wichtig, daß sich die Geschwindigkeit sowie die Motordrehzahl im Meßintervall nicht ändert. Dies kann zum Beispiel dadurch erreicht werden, indem während des Überflugs auf einer möglichst langen Strecke eine konstante Höhe sowie Drosselstellung gehalten wird. Auf diese Weise haben wir bei unseren Messungen gut reproduzierbare Ergebnisse erhalten. Dieser Meßfehler wird übrigens sehr gut an der Visualisierung der Korrelationsfunktion sichtbar. Je breiter der Peak ist, umso weniger wurden die Meßparameter konstant gehalten.
Ein weiterer systematischer Fehler wird durch den Abstand der Flugbahn zum Mikrophon produziert. Da der Dopplereffekt nur die Geschwindigkeitskomponente in Mikrophonrichtung berücksichtigt, ist die tatsächliche Geschwindigkeit immer größer als die gemessene. Bild 5 zeigt den prozentualen Fehler in Abhängigkeit vom Abstand des Vorbeiflugs zum Mikrophon für eine Fluggeschwindigkeit von 200km/h. Je schneller das Modell ist, desto kleiner wird der Fehler, der in der Fachliteratur auch als Cosinusfehler bekannt ist.
Probleme gibt es natürlich bei der Messung von Segelflugzeugen, da diese ja kaum Schall emittieren. Hier könnte man Abhilfe schaffen, indem ein lauter Piezo am diesem befestigt wird.
Inzwischen habe ich das ganze auch bei Turbinenmodellen getestet, allerdings mit eher ernüchternden Ergebnissen. Das Problem liegt hier darin, daß die dominierenden Geräusche nicht vom drehenden Turbinenrad kommen sondern von Verwirbelungen am Turbinenauslaß. Diese Auslaßgeräusche sind rein stochastischer Art und somit nicht für eine Frequenzmessung geeignet.
Aktueller Entwicklungsstand
Das Programm ,welche sich übrigens DopplerSpeed getauft habe, wurde inzwischen soweit aufgepeppelt, sodass jeder Messung ein komplettes Messprotokoll (Bild 6) zugeordnet wird. Es kam in dieser Version unter anderem beim Speed-Cup 2005 in Dachau zum Einsatz, über den ich übrigens auch im MFI ein Bericht Cobra geschrieben habe.
Nebenher läuft aktuelle übrigens noch eine weitere Entwicklung eines Speed-Messsystems auf Basis einer Laufzeitermittlung. Dazu gibts hier mehr Infos.
Links
Gute Erklärungen und anschauliche Bilder zu diesem Thema gibts bei Dietrich Meissner.
Weitere Erklärungen und ein interessantes Windowsprogramm namens WAVEosSCOPE findet sich auf der Seite von Sprut.